- 开元体育官网入口高端装备与智能制造产业链“下午茶”畅聊活动举行
- 开元完整版)搬运机器人设计
- 开元荣联汇智AGV智能搬运机器人有哪些你不知道的秘密呢?
- 开元体育向新聚力 变革跃升!AI+装备制造业高质量发展大会
联系人: 开元
手机: 13862166392
电话: 0512-69211699
邮箱: kaiyuan@qq.com
地址: 开元体育广东省广州市天河区88号
开元完整版)搬运机器人设计
开元完整版)搬运机器人设计(5)此机器人应用于自动生产线上,因此,它应该能够按照控制程序自动运行,即具有自动运行模式。
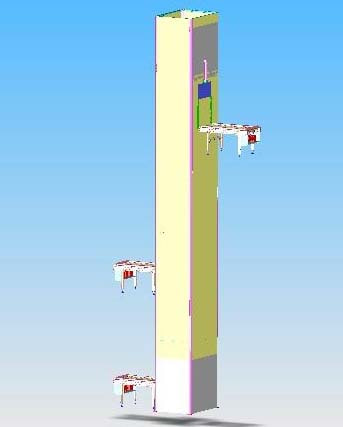
因为圆柱坐标式机器人把回转与升降两个自由度归属于机身,所以设计回转与升降机身,选用旋转液压缸与升降液压缸单独驱动的回转型机身,如图1所示,升降液压缸在上,旋转液压缸在下。
采用双导向杆的臂部伸缩结构。缸体直接固定在升降立柱上,活塞杆与两根导向杆连接一起组成伸缩臂,由于活塞杆与导向杆全部藏在缸体内,油管也从活塞杆内部通过,其特点是结构紧凑,外观整洁。结构如图2所示。
搬运机器人能够模仿人手部的部分动作开元开元,按照设定的程序、轨迹和要求,代替人工在高温和危险的作业区进行单调持久的作业,实现一些人工不可能完成的工作,这不仅可以使人手避免出现可能的危险情况,保障生产安全,还能促进工作线的流水化,提高了工作效率,降低了劳动强度,改善了劳动环境,已经成为现代制造业中不可或缺的一种自动化装置。
本机器人用于生产线上工件的自动搬运,下图为机器人动作示意图,机械手按下述顺序周而复始地工作:
(1)该机器人采用圆柱坐标型,具有三个自由度,即手臂的伸长、缩短,手臂的上升、下降和整体旋转。
(2)该机器人采用液压驱动,其具有体积小、质量轻、结构紧凑、传动平稳、操作简单、安全、经济、易于实现过载保护且液压元件能够自行润滑等一系列优点。
因为工件的形状为圆柱形,所以带“V”型钳口的手爪,本次设计的搬运机器人手爪采用滑槽杠杆式结构,夹紧缸采用单作用弹簧复位式结构,杠杆端部固定安装着圆柱销,当拉杆向上拉时,圆柱销就在两个钳爪的滑槽中移动,带动钳爪绕两支点回转,夹紧工件;拉杆向下推时,使钳爪松开工件。结构如图3所示。
包括夹紧液压缸液压回路设计、伸缩液压缸液压回路设计、升降液压缸液压回路设计、旋转(齿条)液压缸液压回路。液压传动具有较大的功率体积比,压力、流量均容易控制,可无级调速,反应灵敏,可实现连续轨迹控制,维修方便。
采用PLC控制,包括操作面板设计、I/O点数确定及PLC选型、PLC外部接线图设计、PLC控制程序设计。通过分析控制要求,应该设计机械手复位程序、手动运行程序和自动运行程序。
搬运机械手在暂停或者等待指令时开元,液压系统的液压泵一般要处于卸荷状态,因此,还要设计控制液压泵卸荷与否的程序,对液压泵进行控制。