- 开元体育成都混煤行业小型提升机价格便宜
- 开元官网仓储知识库 仓库自动化系统干货(二):ASRS;回转式循环系统;垂直升降
- 开元体育官网入口小型提升机定制价格
- 开元体育官网入口简易型2头液体小型灌装机食品日用品行业用
联系人: 开元
手机: 13862166392
电话: 0512-69211699
邮箱: kaiyuan@qq.com
地址: 开元体育广东省广州市天河区88号
开元官网仓储知识库 仓库自动化系统干货(二):ASRS;回转式循环系统;垂直升降
栏目以仓储物流知识干货为主题进行整理编写,参考智能制造和智能物流领域的前沿论文与专著。在编译时对专有名词和部分术语的英文进行了保留,不足之处欢迎大家指正、讨论!
机器人搬运系统在仓配中心的应用越来越广泛。机器人拥有诸多特点:占用空间小、灵活性高、24小时不间断工作,这些特点与日益发展的电子商务运营领域高度适配。由于新型自动化机器人搬运系统拥有自主控制、灵活布局、网络化、动态运行等独特特性,此类系统的设计和操作控制问题需要新的模型和方法加以解决。仓库的关键部分,即仓库设计、仓库规划以及控制逻辑领域也都随着机器人自动化仓库的发展进行革新。尽管工业机器人的相关发明与应用层出不穷,在现实中也较为常见,但是在学术理论层面上几乎没有被详细研究过。
堆垛机自动化存取系统(AS/RS)发端于20世纪60年代。最初,主要应用于在托盘仓库中存储散装货物。后来,Miniload仓库和多层密集存储仓库也实现了自动化。我们将在本节讨论不同类型的堆垛机/叉车自动存取系统。
这种系统由货架和自动搬运系统(如堆垛机或自动叉车)组成,系统可以是巷道式的(通常使用堆垛机),也可以是自由移动式的(通常使用自动叉车)。在系统执行存储操作时,堆垛机通常从传送带上取下货物,然后存储到 30-40 米高的货架上。巷道内的行驶和提升操作同时进行,出库操作的过程顺序则相反。系统也可以执行双指令循环,将存、取作业结合起来。这样,每个指令周期可节省一次移动距离;不过,在匹配存取作业时可能需要额外的等待时间。存储容器是料箱而非托盘的系统则称为mini-load立体库,入图1所示。
人们对物料单元和小型物料单元巷道式单深位自动仓储系统进行了广泛的研究。最早的科学类文章之一是由 Bozer 和 White于1984 年撰写的。他们计算了单指令循环的堆垛机平均循环时间,并假设堆垛机前往货架内任何位置的概率相同(随机存储策略)。他们的预期循环时间为,其中 tx 堆垛机是到货架内最远位置的行驶时间,ty 是堆垛机到货架内最高位置的提升时间。该公式假定,堆垛机在同一时间行驶和爬升,且到最远位置的行驶时间长于爬升时间。利用该公式,可以得到巷道长度和高度之间的最佳比率,证明该比率为时间平方(SIT),即到最远位置的行驶时间和到最高位置的爬升时间相同。假设堆垛机的移动速度约为其爬升速度的四倍,因此巷道的长度应为其高度的四倍,这样才能最大限度地缩短周期时间。后来,这一公式也进行了调整完善,加入了不同的存储策略(如 ABC 存储)、双指令周期以及装卸点的不同位置(上述公式假设只有一个这样的点开元体育,位于货架的下角)等要素。此外,Gagliardi 等人在2012 年对基于仿真的 AS/RS 模型进行了概述。Boysen 和 Stephan于2016 年提出了一种更为新颖的分类方案,用于定义 AS/RS 中的各种堆垛机的调度问题。
在 ABC库存管理法的情况下,物品会根据周转率被分为不同的类别(如 A、B、C 三类)。此外,还根据到达 L/U 点所需的旅行时间将地点分成若干组。这样可以确保周转率最高的类别中的物品距离该点最近。Hausman 等人在1976 年发表了 ABC 存储和基于 EOQ 的补货的周期时间计算研究。后来,Rosenblatt 和 Eynan(1989 年)将他们的研究结果扩展到 N 个产品类别。Hausman 等人计算了已知 ABC 需求曲线 需求曲线% 的货物(或物料单元)负责 70% 的需求。在计算过程中,他们考虑了根据持续回顾了 规则进行产品补货的问题,即库存量 Q 等于最佳订货量。然而,他们没有考虑到存储类别越多,每个类别存储的物品就越少。这就需要为存储的每个品类的每个物品提供更多的空间,因为每个品类内的空间不能被物品共享,这会延长堆垛机的运行时间。在每个品类存放一件物品的极端情况下,所需的空间为,而在只有一类物品(即随机存放)极端情况下,所需的空间为 。这意味着可以通过上述公式界定存储类别的最佳数量。在实践中,最佳的存储类别数量较少(约为 3 至 5 个),但周期时间对具体数量并不敏感。在如此有限的类别数量下,产品完全可以共享类别中的可用空间。然而,在平均库存水平的基础上,所需的位置数量很快就会增加 40%(Yu 等,2015 年)开元体育。
AS/RS 还可用于在货架上存放双倍深度的货物。为此,堆垛机可配备双深位货叉(double-deep telescopic forks)。多深位或多深度(3D)密集存储系统可将货物存放在更深的仓储巷道中(见图 2)。存储深度取决于产品类型和技术,例如 5-15 装载深度。这些系统就特别适用于首要考虑存储空间的仓库,例如生鲜农产品仓库和冷库。在典型的堆垛机密集存储系统中,存储和取回(S/R)堆垛机负责货架水平和垂直方向的移动,正交换向输送机负责深度移动。基于堆垛机的多深度密集存储系统可根据深度移动的机制进一步分为三类:后推式货架(push-back rack,又称压入式货架)系统、动力式货架(conveyor-based)系统和穿梭板式货架(satellite-based)/子母车系统。
后推式货架系统:在这种类型中,堆垛机(或自动叉车)通过机械方式将货物推入存储通道。该系统根据后进先出(LIFO)原则工作。存储通道上的一个小斜坡利用重力来确保存储通道前始终有货物。后推式托盘货架的货道深度最多可容纳 5 个货物。
动力式货架系统:这些系统中的货架配有输送机(见图3)。如果传送带可以双向移动,则操作为后进先出,类似于后推式货架。输送机也可以成对运行(通过重力或动力)。入库输送机,物料单元流向货架后端。出库输送机位于入库输送机的旁边,在出库输送机上,物料单元流向货架的前端并停在堆垛机的取回位置。在重力输送机的情况下,货架后部装有一个简单的升降装置,将物料单元从下部的入库输送机提升到上部的出库输送机。在重力式输送机的情况下,机架后部装有一个简单的升降机构,将单元载荷从下部入库输送机提升到上部出库输送机(见图 3)。当需要取回货物时,位于出库输送机前侧的停止开关停止物料单元运动。升降机驱动货物单元旋转,由于它是速度最慢的元件,因此它决定了有效的旋转速度。为了取回托盘,相邻的两条重力输送机至少要有一个空槽(De Koster 等人,2008 年)。使用动力输送机的仓库系统不需要升降机,但需要使用更昂贵的动力输送机,因为动力输送机在出现故障时不容易修复。不过,动力输送机可以实现更高密度的存储,因为使用动力输送机的货架可以比使用重力输送机的货架建得更深。
穿梭板式货架/子母车系统:子母穿梭车由母车移动穿梭车(The Shuttle)和子车卫星小车(The Satellite)两部分组成,在这种系统中,卫星小车与母车(穿梭车或堆垛机)链接,进行深度移动。卫星小车拿起一个存储托盘,行驶到存储通道。然后,母车松开卫星小车,卫星小车沿着存储通道行驶,存储货物。同样,为了取回货物,卫星小车行驶到货物下方取回托盘,并以相反的顺序完成剩余的操作。在某些情况下,卫星小车也可以专用于通道。如果系统中穿梭车的数量少于存储通道,母车就会在通道之间移动卫星小车(Stadtler,1996 年)。
与单深位 AS/RS不同,有关多深位 AS/RS的论文数量有限。Sari 等人2005 年开发了流动货架AS/RS的闭式旅行时间表达式。表达式依赖于连续存储架近似值(continuous storage rack approximation),通过离散偶数模拟进行了验证。模拟采用了离散货架维数方法。他们发现,误差在 11%-14% 之间变化,百分比误差属于合理范围。因此,此类模型可用于估算系统吞吐能力。
De Koster 等人(2008 年)使用单指令周期和随机存储策略,为一个基于堆垛机、带有旋转传送带的密集存储系统开发了闭式旅行时间表达式。堆垛机的预期取回旅行时间与重力输送机和动力输送机是相同的。利用预期旅行时间表达式,他们计算出了使行程时间最小化的三个维度之间的最佳比率。他们还提供了双指令循环的近似行程时间表达式,并用它来优化系统尺寸。他们发现了一个与直觉相反的结果:即货架货位按照1:1:1的正方体结构设计并不是最优选择。尽管正方体货架的性能相当不错,但偏离了最佳货架配置(三维最佳比例:0.72:0.72:1)约 3%。Yu 和 De Koster在2009年扩展了 De Koster 等人对基于周转存储策略的分析,确定了能使预期周期时间最小化的最佳货架尺寸。他们通过分析确定了任何给定货架容量和 ABC 曲线倾斜度下的最佳货架尺寸开元官网仓储知识库 仓库自动化系统干货(二):ASRS;回转式循环系统;垂直升降库。他们发现,ABC 曲线的倾斜度越大,与随机存储策略相比节省的预期时间就越多。杨等人(2015)进一步扩展了 De Koster 等人(2008)的分析,考虑到了 S/R 机器的加速和减速,优化了系统形状。S/R 机器这一要素对系统的最佳形状有直接影响。对于 S/R 机器速度恒定的特殊情况,他们的研究结果与 De Koster 等人之前的研究结果一致。Hao 等人(2015 年)也开发了预期旅行时间表达式,并优化了随机存储策略下的货架布局。不过,他们选择了位于货架中间的 I/O 点(实际上、 对于巷道式堆垛机而言,这在现实中很难实现),在相同的运行条件下获得了更低的预期旅行时间和更高的吞吐量。
密集存储的最大缺点是托盘只能从一侧进入。因此,托盘要么根据后进先出原则取回,要么对托盘进行重新移动布局。Stadtler (1996 年)对每个托盘的取回时间进行估算,并提出了一种考虑到这一问题的存储和取回分配规划工具。决策模型以混合整数程序的形式制定,并且采用禁忌算法求解。结果表明,密集存储系统可以在工作量大、货架利用率高的情况下运行,只需进行少量托盘重新布局(在 42 天的运行期内,货架利用率为 78%,搬迁次数为 6%)。Yu 和 De Koster在2012 年开发了一种启发式算法,用于动力式密集存储系统双指令循环工况下货物的存取排序。他们比较了五种排序启发式的完成时间性能:
2.最近邻(Nearest Neighbor,NN),即排序基于存储和取回位置之间的最小旅行距离;
4.最短双循环(Shortest Dual Cycle,SDC),即排序是在每一步中最小化双循环时间的方式下完成的;
数值结果表明,PPR-SL策略比其他排序策略效率高20%以上。对于具有穿梭机或卫星小车的密集型AS / RS,最大的挑战之是重新排列单元负载和取回正确的单元负载所需的额外时间。因此,许多公司使用每个通道的专用存储策略,减少了重新排列布局的时间,但降低了通道利用率。为了克服这个缺点,Zaerpour等人2013年提出了一个共享存储策略的数学模型,该模型最小化了越库存储(cross-dock/temporary storage)的总取回时间。他们使用构建和改进(C&I)的启发式算法来解决该模型。他们表明,对于大多数实际情况,共享存储优于专用存储,具有更短的响应时间和更好的车道利用率。Yu和De Koster(2009b)专注于确定具有两个存储类(高周转类和低周转类)的堆垛机密集存储立库的最优区域边界。他们将该问题表述为非线性整数规划,并使用分解技术和一维搜索方案获得了解决方案。他们表明,堆垛机的旅行时间受到区域尺寸、区域边界和ABC曲线偏斜的影响。
回转式/循环系统是一种自动存取系统,系统的货架连接在一起,在一个封闭的空间中循环旋转。旋转方式有水平和垂直两种(见图 4a 和 4b)。在该系统中,系统有一个固定的拣选工作站,循环系统将物品运送到该工作站。回转式仓储系统尤其适用于中小型物品,如书籍、保健和美容产品(Litvak 和 Vlasiou,2010 年)。
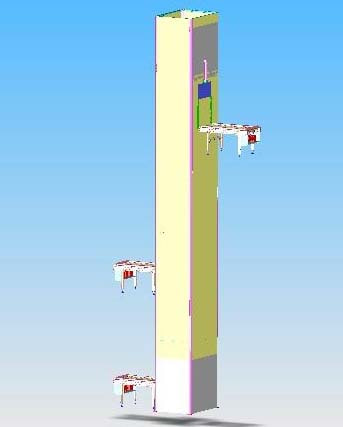
垂直升降库系统(VLM)与回转式仓储系统相似,但运行方式不同。它由两列托盘组成,中间有一个安装在升降机上的存取装置(见图5a)。当需要某件物品时,存取装置会找到存放该物品的托盘,并将托盘送到位于系统前方的拣选位,就像回转式仓储系统一样(MHI,2015 年)。在这些系统中,拣选装置的静态位置消除了其行走(Meller 和 Klote,2004 年),从而提高了拣选生产率。拣选装置还可以执行其他任务,如包装和贴标签,甚至在等待转盘取回物品时为另一个转盘或 VLM 提供服务。
在自动分配系统中,产品是自动分配的。补货仍由人工进行,但可以在不中断分拣流程的情况下完成。常见的自动分配系统是 A 字架拣选系统。该系统由呈 A 字形布局的产品通道组成,形成一个通道,收集带位于通道内开元体育。通过在传送带上的虚拟窗口自动分配相应的产品来完成订单(见图5b)。A 字架适用于大量小尺寸物品的订单,该系统主要用于制药、化妆品和邮购行业。