联系人: 开元
手机: 13862166392
电话: 0512-69211699
邮箱: kaiyuan@qq.com
地址: 开元体育广东省广州市天河区88号
开元官网【CN209700811U】一种机器人悬挂轮及机器人悬挂结构【专利】
地址 518000 广东省深圳市南山区粤海街 道粤兴三道2号深圳虚拟大学园院校 产业化综合大楼A区A605-607-O
1 .一种机器人悬挂轮,其特征在于 ,包括: 车轮组件,包括车轮和垂直于所述车轮的转动平面连接所述车轮的连接轴; 直线移动机构,包括导轨以及沿所述导轨移动的连接块; 所述连接块具有固定孔 ,所述连接轴相对于所述连接块可转动限 定在所述固定孔内 , 所述导轨与所述连接轴垂直设置; 所述连接块还连接有弹簧减震装置,所述连接块沿所述导轨移动时所述弹簧减震装置 具有恢复力。 2 .根据权利要求1所述的一种机器人悬挂轮,其特征在于,所述导轨和所述连接块以所 述连接轴为中心对称设置。 3 .根据权利要求1所述的一种机器人悬挂轮,其特征在于,所述导轨和所述连接块以导 轨和滑块配合结构、凹槽和滑块配合结构、不自锁的滚珠丝杠和滑块配合结构中的结构之 一配合移动。 4 .根据权利要求1所述的一种机器人悬挂轮开元体育官网入口,其特征在于,所述弹簧减震装置以所述连 接轴为中心对称设置。 5 .根据权利要求1所述的一种机器人悬挂轮,其特征在于,所述弹簧减震装置以其弹力 作用方向平行于所述导轨设置。 6 .根据权利要求1所述的一种机器人悬挂轮,其特征在于,还包括用于限定所述连接块 移动的固定底板和固定顶板,所述导轨固定在所述固定底板和所述固定顶板之间。 7 .根据权利要求6所述的一种机器人悬挂轮,其特征在于,所述固定底板和所述固定顶 板之间设置有支撑板 ,所述弹簧减震装置一端连接所述连接块 ,所述弹簧减震装置 另一端 连接所述支撑板。 8 .根据权利要求7所述的一种机器人悬挂轮,其特征在于,所述支撑板上设有线槽,所 述固定底板上设有与所述线槽连通配合的线孔,所述线 .一种包括有权利要求1-8任一项所述机器人悬挂轮的机器人悬挂结构,其特征在于, 包括底盘 ,所述底盘上平衡对称设置有两个所述机器人悬挂轮 ,以 两个所述机器人悬挂轮 的 对称中 心为平衡设置有至 少3个万向从 动轮 ,所述万向从 动轮与所述机器人悬挂轮之间 具有自适应高度。 10 .一种包括有权利要求1-8任一项所述机器人悬挂轮的机器人悬挂结构,其特征在 于,包括底盘,所述底盘平衡对称或阵列设置有至少3个所述机器人悬挂轮。
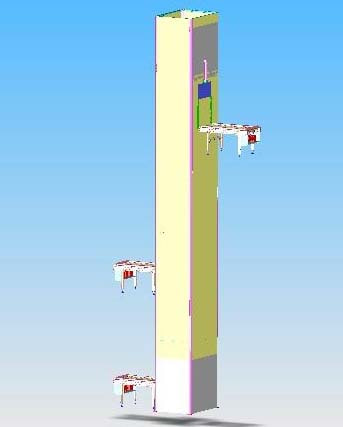
人悬挂结构,其中 开元官网【CN209700811U】一种机器人悬挂轮及机器人悬挂结构【专利】,机器人悬挂轮包括:车轮,车 轮组件,包括车轮和垂直于所述车轮的转动平面 连接所述车轮的 连接 轴 ;直线移动机构 ,包括导 轨以及沿所述导轨移动的连接块;所述连接块具 有固定孔,所述连接轴相对于所述连接块可转动 限定在所述固定孔内 ,所述导轨与所述连接轴垂 直设置 ;所述连接块还连接有弹簧减震装置 ,所 述连接块沿所述导轨移动时所述弹簧减震装置 具有恢复力。机器人悬挂结构包括上述机器人悬 挂轮 ,主要包括两 种 ,一 种为两悬挂轮 和三万向 从 动轮 ,另一 种为三悬挂轮的 方式 。本实 用新型 的机器人悬挂轮及机器人悬挂结构,克服了车轮 水平偏移或者绕平行于地面的转轴偏转现象 ,避 免了出现架空现象。
技术领域 [0001] 本实用新型涉及机器人技术领域,尤其涉及一种机器人悬挂轮及机器人悬挂结 构。
背景技术 [0002] 随着近年来人工智能技术的快速发展,智能机器人领域呈现出飞速的发展和进 步,机器人的移动成为了智能机器人必备的基础技能。 [0003] 机器人悬挂轮或机器人悬挂结构是为了解决机器人因地面高低不平导致机器人 严重颠簸而设计的 ,尤其是双轮差速驱动的机器人 ,由于地面不平会出现驱动轮被从动轮 架空,导致出现无法驱动的现象。 [0004] 现有的机器人悬挂轮或机器人悬挂结构一般是通过转轴、摆臂和弹性装置来实现 悬挂的 ,两个摆臂一端通过转轴相连 ,另一端连接车轮 ,通过弹性装置使车轮受向地面的恢 复 力 ,从而克服地面不平。这种结构 ,由 于摆臂倾斜 ,车轮 和地面的 接触点会随 着地形的 变 化而前移或者后移,导致机器人在运动时不能精确的转向 ,尤其是原地旋转时,会发生偏 移。
实用新型内容 [0005] 鉴于上述状况,有必要提供一种精确转向的机器人悬挂轮及机器人悬挂结构。 [0006] 为了解决上述技术问题,本实用新型采用的技术方案为:一种机器人悬挂轮,包 括:车轮组件,包括车轮和垂直于所述车轮的转动平面连接所述车轮的连接轴;直线移动机 构,包括导轨以及沿所述导轨移动的连接块;所述连接块具有固定孔,所述连接轴相对于所 述连接块可转动限 定在所述车轮固定孔内 ,所述导轨与所述连接轴垂直设置 ;所述连接块 还连接有弹簧减震装置,所述连接块沿所述导轨移动时所述弹簧减震装置具有恢复力。 [0007] 进一步的,所述导轨和所述连接块以所述连接轴为中心对称设置。 [0008] 进一步的,所述导轨和所述连接块以导轨和滑块配合结构、凹槽和滑块配合结构、 不自锁的滚珠丝杠和滑块配合结构中的结构之一配合移动。 [0009] 进一步的开元体育官网入口,所述弹簧减震装置以所述连接轴为中心对称设置。 [0010] 进一步的,所述弹簧减震装置以其弹力作用方向平行于所述导轨设置。 [0011] 进一步的,还包括用于限定所述连接块移动的固定底板和固定顶板,所述导轨固 定在所述固定底板和所述固定顶板之间。 [0012] 进一步的,所述固定底板和所述固定顶板之间设置有支撑板,所述弹簧减震装置 一端连接所述连接块,所述弹簧减震装置另一端连接所述支撑板。 [0013] 进一步的,所述支撑板上设有线槽,所述固定底板上设有与所述线槽连通配合的 线孔,所述线] 本实用新型还提供一种机器人悬挂结构,其包括至少两个上述机器人悬挂轮,并 且,包括底盘,所述底盘上平衡对称设置有两个所述机器人悬挂轮开元体育官网入口,以两个所述机器人悬挂