- 开元体育官网入口因存在安全生产违法行为阜阳三个项目施工单位被通报处罚!
- 开元官网快讯_河北新闻网
- 开元体育上海微电机研究所公开基于差动机构的机器人腿部和四足机器人专利
- 开元2024-2026年中国高速重载链条产业研究报告
联系人: 开元
手机: 13862166392
电话: 0512-69211699
邮箱: kaiyuan@qq.com
地址: 开元体育广东省广州市天河区88号
开元体育上海微电机研究所公开基于差动机构的机器人腿部和四足机器人专利
五金2月26日,上海微电机研究所(中国电子科技集团公司第二十一研究所)公布“一种基于差动机构的机器人腿部和四足机器人”的专利,该专利于2020年12月15日,申请公布号为CN112407096A。
四足机器人近几年逐渐成为国内外学者研究的热点,目前的四足机器人腿部机构驱动主要是通过关节直驱方式,该方法控制系统较为简单可靠开元体育官网入口,但是膝关节电机成为髋关节电机的负载,整体结构冗余累赘。因而,在四足机器人腿部机构设计中,要设计所需驱动电机输出力矩最小化的腿部机构是难点所在。
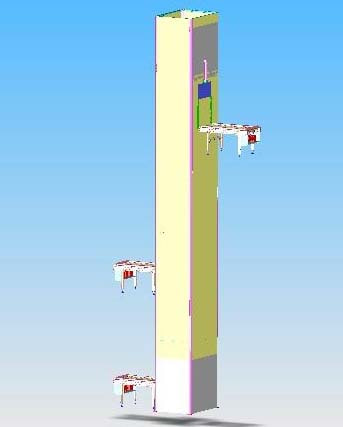
根据专利摘要,本申请提供了一种基于差动机构的机器人腿部和四足机器人。该机器人腿部中,第一驱动轮与第二驱动轮并列设置,第一驱动轮与髋关节转轴转动连接开元体育官网入口,第二驱动轮安装于髋关节转轴上,其中,髋关节转轴转动安装于腿部的髋关节处;第一从动轮与第二从动轮并列设置,且均通过膝关节转轴转动安装于腿部的膝关节处;第一从动轮与腿部的大腿固定连接,第二从动轮与腿部的小腿固定连接;第一驱动单元和第二驱动单元均安装于大腿上,第一驱动单元能够通过第一驱动轮带动第一从动轮转动,以驱动大腿绕髋关节转轴摆动;第二驱动单元能够通过第二驱动轮带动第二从动轮转动开元体育官网入口,以驱动小腿绕膝关节转轴摆动,且小腿的摆动方向与大腿的摆动方向相反。
加快培育人形机器人产业体系!青岛市发布人形机器人发展行动计划:将聚焦“3+2+4”的产业发展路径【附人形机器人前景预测】
重大升级!国家地方共建具身智能机器人创新中心揭牌成立:将致力于解决各类创新主体共性问题【附智能机器人发展趋势分析】
2024年中国工业机器人行业供应链十大代表性企业:埃斯顿、新松机器人、拓斯达、埃夫特、新时达……
2024年建筑机器人行业供应链十大代表性企业:博智林、特辰科技、中建科技、上海建工、蔚建科技……
重大突破!美国科学家开发出由真菌和计算机组成生物混合机器人,可用于探测辐射【附智能机器人技术赛道观察图谱】
因论文数据,想要了解2014~2021年浙江省茶叶出口量、出口金额以及它们占全国比重;2021年浙江省茶叶出口各个国家的出口量?
请问新能源车未来五年国内渗透率为多少,有没有测算逻辑参考?国内外新能源车渗透率的峰值能达到多少?
因论文需要,想要了解广东省纺织品类出口的主要市场,具体的出口额为多少,不同贸易方式出口额多少占比多少。蟹蟹!?开元体育上海微电机研究所公开基于差动机构的机器人腿部和四足机器人专利